Pilotprojekt Stauendewarnung
Nutzung von Floating Car Data für die Lokalisierung von Stauendendaten
Ziel des Projekts Stauendewarnung ist es, mit Hilfe von Floating Car Data, die räumliche und zeitliche exakte Bestimmung der Stausituationen in Echtzeit zu ermöglichen. Daraus abgeleitet werden den Verkehrsteilnehmern Stauwarnungen in das Fahrzeug übermittelt, bevor sie auf das Stauereignis auffahren. Im Pilotversuch Stauendewarnung wird ein Pilotsystem konzipiert und realisiert und anschliessend im Realbetrieb während mehreren Monaten eingesetzt.
Das Pilotsystem umfasst drei Systeme:
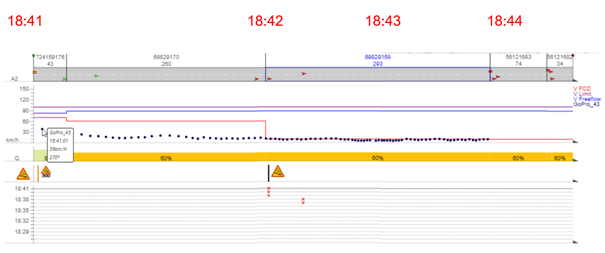
Das System Detektion übernimmt die FCD-Rohdaten aus den verfügbaren Datenquellen. Die Daten werden integriert und der Verkehrsfluss bewertet. Aufgrund der Einzelfahrzeugdaten werden zudem kontinuierlich die aktuellen Anfangsorte der Staus ermittelt und die Vorwarnpunkte berechnet.
Das System Verifikation besteht aus mehreren, von der FC-Daten-Erfassung unabhängigen Bewertungen der Stausituationen. Mit Hilfe der Daten aus der automatischen Verkehrszählung werden die minütlich aggregierten Geschwindigkeiten mit den dort vorkommenden Stausituationen verglichen. Mit den Bildern der Überwachungsvideos erfolgt eine qualitative Beurteilung der Verkehrssituation. Tägliche Stichproben werden mit Staufahrern erhoben, welche ihre Fahrten im Untersuchungsperimeter aufzeichnen und zur Verfügung stellen. Mit diesen Daten findet ein räumlicher und zeitlicher Vergleich der Stauenden statt.
Das System Visualisierung stellt alle im Pilotversuch anfallenden Daten der Systeme Detektion und Verifikation dar. Damit werden die Resultate aus dem Pilotversuch einfach interpretierbar bereitgestellt.
Die Rosenthaler + Partner AG führte zusammen mit dem ASTRA das Projekt und erstellte das Gesamtkonzept für die drei Systeme des Pilotversuchs. R+P realisierte die Schnittstellen zu den Dashcams der Staufahrer sowie die teilautomatisierte Auswertung und Verifikation der aus den FC-Daten abgeleiteten Staudaten. Die Rosenthaler + Partner AG war zudem für die Organisation, Durchführung und Auswertung des Feldversuchs zuständig.
Carte Blanche Conseil erstellte ein Feinkonzept für die Auswertung der FC-Daten und lieferte die für die Sammlung und Auswertung der Floating Car Daten nötigen Softwarekomponenten und passte diese auf die Bedürfnisse des ASTRA an.
Der Algorithmus des Systems Detektion ist parametrisiert. Damit können im Pilotbetrieb unterschiedliche Varianten der Detektion überprüft werden. Mit Unterstützung des Verifikationssystems wird in mehreren Optimierungsschritten eine möglichst optimale Parametrisierung des Detektionssystems ermittelt. Aus dem Pilotversuch werden Erkenntnisse über die Datenverarbeitungskette von den fahrzeugseitigen Rohdaten bis zur Einspeisung an die Verbreitungskanäle gewonnen. Erwartet werden auch Erkenntnisse bezüglich der Latenzzeit der Echtzeitdaten und der für ein solches System nötigen Durchdringungsrate. Weiter werden die möglichen räumlichen und zeitlichen Genauigkeiten mit Hilfe des Verifikationssystems qualitativ und quantitativ bewertet.
Die Ergebnisse zeigten, dass die genaue Lokalisierung in Echtzeit unter bestimmten Bedingungen möglich ist. Voraussetzung ist die Verfügbarkeit von FC-Daten in Echtzeit und ein auf die jeweilige Situation der Verkehrsführung parametrisierbaren Algorithmus.
Die Projektabwicklung verlief trotz sehr hoher Ansprüche dank der ausgezeichneten Zusammenarbeit mit dem ASTRA, einer transparenten und offenen Projektführung und dem stetigen Streben nach Lösungen.
Kontaktpersonen






Koch Rainer
Dipl. Kultur-Ingenieur ETH
MAS FHBB Business Engineering Management
Partner, Geschäftsleiter, Verwaltungsrat
vCard









Weitere Projekte
Die drei "Weiteren Projekte" erfüllen viele der Kriterien des angezeigten Projektes ebenfalls.